

Solutiones Sigillandi pro Robotica — Sigilla Praestantissima pro Robotica Industriali et Automatione
Conspectus
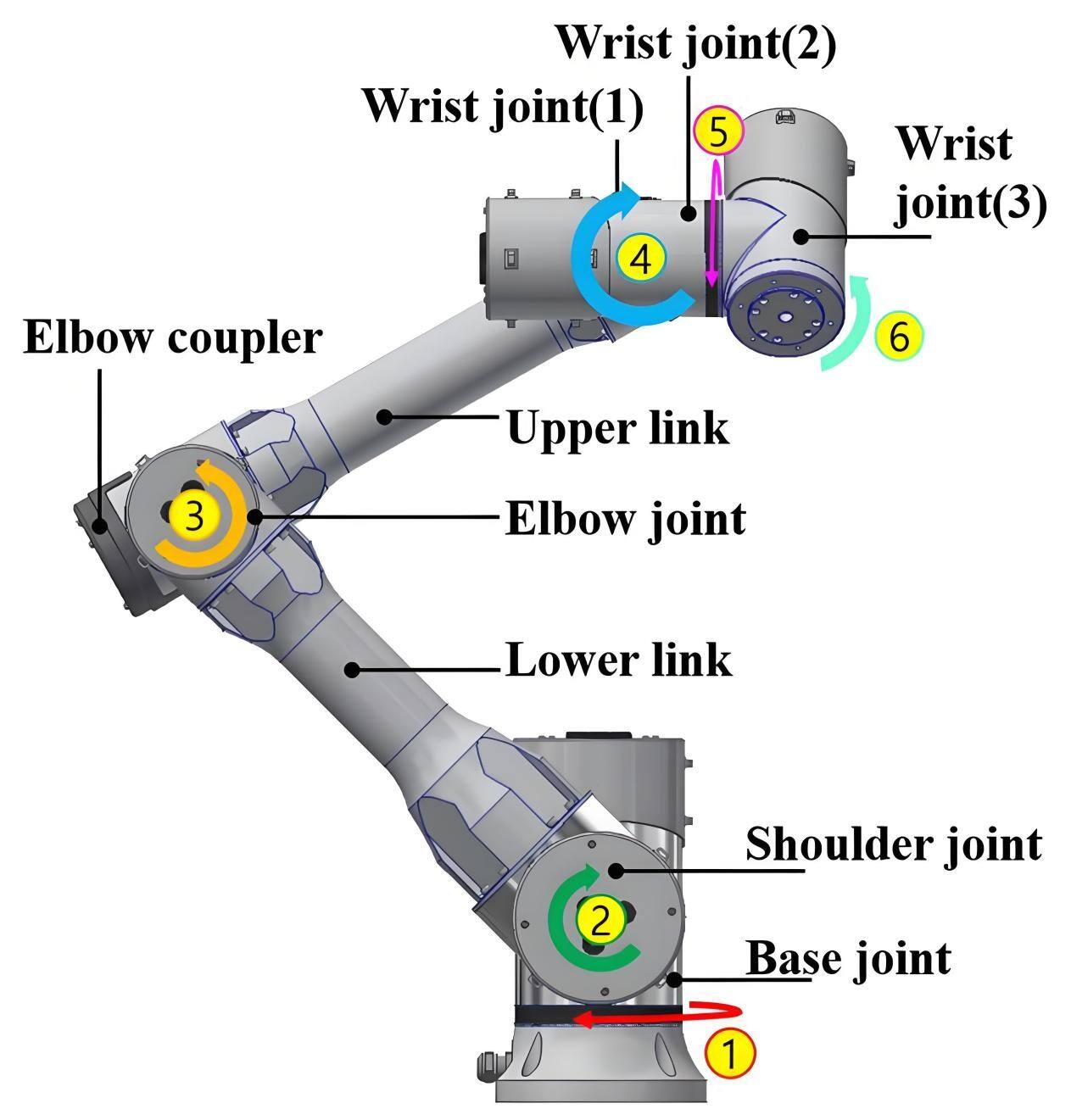 |
Systemata robotica et automationis altam praecisionem, repetibilitatem, et operationem continuam in variis industriae sectoribus, ut fabricatio, electronica, instrumenta medica, et semiconductoria, postulant. Componentes obsidentes praecipuum agunt partem ad stabilitatem motus et ad fidem diuturnam servandam. |
Diversa a machinis vulgaribus, robotica frictonem minimam et motum lenem praecipue requirit. Etiam levis incrementum resistentiae obsidentis accuratiam positionis et efficaciam systematis minuere potest. Obsidentes igitur efficiendae sunt quae obsidionem efficacem cum fricitione et attritione minimis coniungant.
Haec systemata saepe operantur altis cyclorum frequentiis, cum motibus crebris incipientibus et desinentibus, et cum exigentiis severis de munditia. Defectus componentium obsidentium ad diminutam accuratiam, contaminationem, augmentatam attritionem, et temporis intermissionem ducere possunt.
Tesel Seal solutiones obsidentes praecisas efficit quae ad frictonem minimam, ad durabilitatem maximam, et ad performancem stabilem in applicationibus roboticis destinatae sunt.
Conditiones Operationis et Parametri Ingeniorum
Operatio Dynamica Altae Frequentiae
Systemata robotica continue operantur cum multimilibus cyclis motus per totam vitam suam. Signa hermetica debent diuturnum attritum et repetitam vim mechanicam sustinere.
Exigentiae Pressionis Contactus Infimae
Comparata ad systemata hydraulica, signa hermetica robotica saepe sub pressione contactus infima operantur, quae aequilibrii curam inter efficaciam hermeticam et frictionem infimam postulat.
Influentia Thermica
Calor localis ex motoribus et attritu proprietates materiales afficere potest. Signa hermetica stabilitatem suam sub condicionibus thermalibus variabilibus servare debent.
Conditiones Lubricationis
Plura systemata robotica cum lubricatione minima aut nulla operantur, quare signa hermetica sub conditionibus aridis vel semiaridis fiduciam praebere debent.
Cohibitiones Designis Compactis
Limitationes spatii solutiones hermeticas compactas et accurate fabricatas exigunt, quae in compositionibus minutissimis performancem suam servant.
Praecipua Difficultates in Sigillatione Robotica
Frictio Regulanda et Motus Stabilitas
Frictio nimia efficienciam motus minuere potest et comportamentum adhaesionis-et-scissionis (stick-slip) inducere, quod accuratam positionem et operationem lenem afficit.
Resistentia ad Usum Multiciclicum
Operatio continua ducit ad usum notabilem per tempus. Signa hermetica debent suam functionem servare per miliones cyclorum.
Contaminatione Pugnare
Ambientia mundae exigunt signa hermetica quae impediunt ingressum particulae et minuunt generationem detriti interni ex attritione.
Limitatio loci
Designationes roboticae compactae exigunt parva et altissime exacta componentia hermetica sine detrimento functionis.
Scelerisque stabilitatem
Calor generatus durante operatione potest influere in functionem materiae. Signa hermetica debent manere stabilia sub variationibus temperaturarum localibus.
Praecipuae Proprietates et Praestantiae
Tecnologiae Obstruendī
Strategiam selectionis materialis
Electio materiae in praestantia sigillandi roboticorum partem criticam agit.
|
Materia |
Claves beneficia |
Applicatio |
|
PTFE |
Frictio parva, stabilis ratio chemica |
Motus praecisus |
|
PEEK |
Vis magna, resistentia ad attritionem |
Componentia Structurales |
|
TPU |
Flexibilitas et Durabilitas |
Sigillatio dynamica |
|
FKM |
Resistencia a la Temperatura y a los Químicos |
Usus generalis |
Electio materiae idoneae optima praestat functionem et diuturnitatem.
Usus
Robotica Industrialis |
Adhibetur in bracchiis roboticis et systematibus automationis, ubi praecisio et repetibilitas criticae sunt. |
Robota collaborativa (cobota) |
Exigunt motum aequabilem et operationem tutam in ambientibus interactionis inter hominem et machinam. |
Automatio Semiconductor |
Exigit solutiones sigillandi ultra-puras cum minima generatione particulae. |
Robotica Medica |
Exigit altam praecisionem, fidem, et adhaesionem ad severa normativa. |
Analysis defectuum
Communia modi defectus in systematibus sigillandi roboticis sunt:
- Instabilitas ex frictione orta quae accuratiam motus afficit
- Usura quae ad deterioratam functionem obsidionis ducit
- Generatio partículárum quae contaminationem causant
- Deterioratio thermica quae proprietates materiae afficit
Intellectus horum mechanismorum defectus ad meliorem obsidionis conceptionem et functionem perficiendam confert.
Optimatio Perficiendi
Optimizatio functionis obsidionis materias idoneas seligendo, geometriam obsidionis perpoliendo, et motum systematis analysando continetur.
Minuere frictionem, resistentiam usurae augere, et contaminationem minuere sunt praecipui fines.
Index Emptoris
Ad solutionem obsidionis rectam seligendam, haec aestimanda sunt:
- Typus et celeritas motus
- Exigentiae praecisionis
- Environmental Conditions
- Limitationes Spatii
- Expectata vita operativa
Cum peritis ingeniariis operam gerere optimos fructus sinit.
Cur Nostrae Solutiones Sigillandi Roboticae Eligi Deberent
Nos peritiam in materiis, ingeniariae praecisionem et cognitionem applicationum coniungimus, ut solutiones sigillandi altissimae efficaciae praebere possimus.
Virtutes Nostros Includent:
- Profunda cognitio necessitatum systematum roboticorum
- Solutiones sigillandi ad mensuram ingenio elaboratae
- Consistentis producti qualitas
- Praestatio fidabilis sub condicionibus dynamicis
- Auxilium ingeniarium per totum vitae cursum operis
Capacități de Inginerie Personalizate
Omnis applicatio robotica necessitates unicas habet. Cum clientibus arcte cooperamur, ut solutiones sigillandi optimizatas elaborare possimus.
Nostras capacitates includunt:
- Analysis motus et optimizatio frictionis
- Selectio materiae pro praestatione et durabilitate
- Design geometricus sigillorum ad mensuram
- Prototypatio Celeris et Validatio
Nostrum est propositum tibi adiuvare, ut optimam praestationem, praecisionem, et fidem consequaris.
FAQ
Cur frictio parva in robotica importantia habet?
Frictio parva motum lenem efficit, abraditionem minuit, et praecisionem positionis meliorat.
Quae materiae ad applicationes sigillandi in robotica optima sunt?
PTFE et PEEK saepe utuntur propter frictionem parvam et stabilitatem magnam.
Num solutiones sigillandi praecisionem roboticam afficere possunt?
Ita. Praestatio sigillandi directe fricionem, abraditionem, et constantiam motus afficit.
Num solutiones sigillandi ad mensuram praebetis?
Ita. Applicationes roboticae saepe desiderant designa sigillandi ad certas necessitates accommodata.
Appelatio ad Actionem
Praecisionem augere. Abraditionem minuere. Praestationem systematis maximizare.Systemata tua robotica in certa sigillandi opera nituntur.
Responsiō intra vigintī quattuor hōrās.
|
 |